LiDAR 和光学滤波片 —— 帮助自动驾驶汽车看得更加清晰
“‘方向盘’是什么?”如果有任何一个驾驶过、乘坐过或即便只是见过汽车的人,现在问出这个问题也会十分奇怪。但数十年后,这个问题可能就不会那么罕见了。随着传感系统和成像系统功能的日益强大和成本的持续降低,加之打造更加安全高效的运输系统的强烈愿望,这一发展趋势正全力驱动着自动驾驶汽车的发展进入快车道。LiDAR 是帮助这一发展能最终达到“5 级水平”自动驾驶的关键技术:没有方向盘和制动踏板,驾驶过程也不再有人工干预。
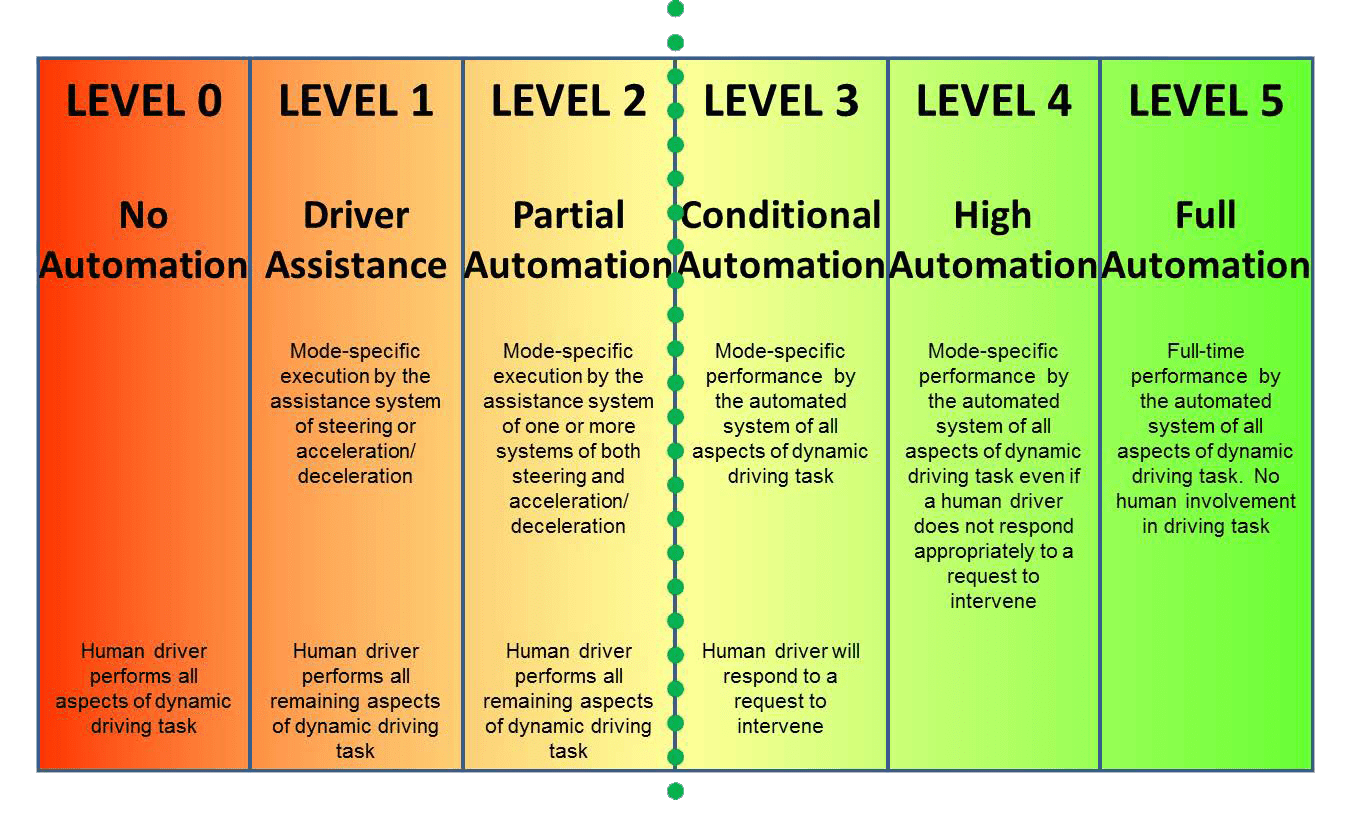
很多高端(中、低端正日益增多)车辆已经配备了可提供“1 级到 2 级水平”自动驾驶的高级驾驶辅助系统 (ADAS),用以帮助检测/避免碰撞及发出车道偏离警告。这其中的一些原型车/试生产车型(如奥迪 8)可以达到完全离手运行的水平(“3 级水平”)。诸如谷歌 (Google)/ Waymo 和沃尔沃 (Volvo) 的一些公司认为,只有完全自动化的汽车才能增加对消费者的吸引力,而混合渐进的方法则做不到。在这种信念之下,这些公司直接跳过了过渡步骤,致力于开发具备“5 级水平”的完全自动驾驶汽车。“自主之马”已冲出了马厩,再想关上门为时已晚。
使自动驾驶成为可能
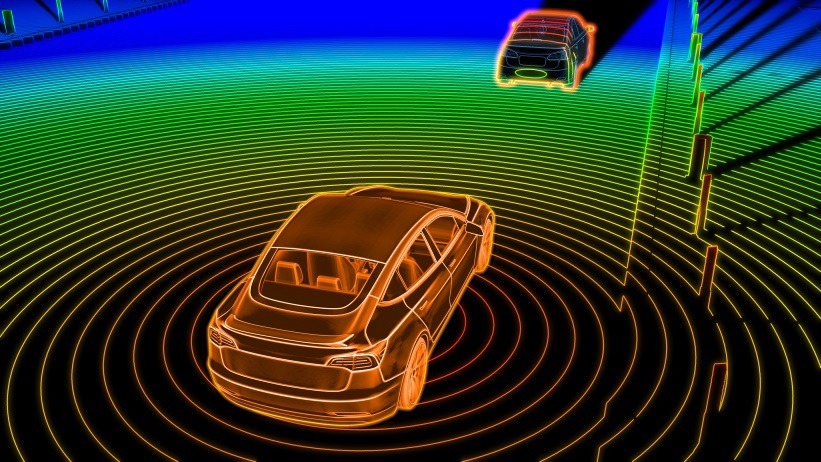
汽车自动驾驶的根本在于车辆如何自动反应——根据环境进行导航、制动、加速、转向;而不管其他车辆、路况、行人情况如何,或是否有其他不可预测的潜在障碍或风险。老话说:“如果你不能衡量它,那么你就不能管理它。”这句话同样适用于汽车的自动驾驶;车辆需要通过对其状况和环境的精确传感、成像和探测,在不断动态变化的场景中衡量其环境和自身位置,以便管理路径,安全通过整个道路基础和周围环境。
有很多种传感器技术均可帮助建立车辆及其周围环境的动态 3D 地图,但为自动转向、自动加速和制动(即上路行驶)提供导航的三项关键技术是:雷达,摄像头,以及最近的 LiDAR。这些技术都各有其利弊(参见图 2)。

雷达(包括中距和远距离)可在所有光照和环境状况下衡量最远 200 米之内物体之间的距离和相对速度,但因为无线电波的波长较长且使用了宽波束,所以无法鉴别和解析所探测到物体的细节信息(例如摩托车前进的方向,行人是走近还是远离车辆的行车路线)。
光学摄像头可以提供场景的精确图像,但距离有限;不能提供距离和相对速度方面的信息,且只能在高可见度的良好光照条件下才能发挥作用。摄像头所提供的视野几乎就是人类驾驶员视野的重复,但我们想要且也需要比我们自己所见驾驶环境更佳的自动驾驶解决方案。
在自动驾驶传感技术领域中,LiDAR 算是崭露头角,但其本身却远远称不上是新技术。LiDAR 是“光探测和测距 (Light Detection and Ranging)”的首字母缩写,作为一项防御技术于 50 年前被开创出来(用于安全测距和瞄准类应用场景)。
从根本上说,LiDAR 包括从光源中发射光线(与雷达所用的无线电波截然不同)及测量返回光束。因所用波长(标准波长为 905 纳米或 1550 纳米)比无线电波短很多个数量级,所以可使截断入射光的物体所形成的图像有更高的分辨率。此外,与摄像头不同的是,LiDAR 系统会照亮周边环境,不再依赖于环境光线,不论在白天还是夜晚都能同样良好运作。在低能见度状况下(例如起雾或下雨),工作波长大于可见光波段也是一种优势。当然雷达所用波长更长的无线电波在这种状况下优势则更为明显。眼睛安全防护是使用激光照明时的另一个重要因素。1550 纳米光源的低功率解决了这一问题。最后一点同样重要,则是价格问题。虽然 LiDAR 系统的价格正在下降,但仍然比雷达或摄像头选项要贵。虽然 905 纳米 LiDAR 系统可使用在摄影技术领域常见的标准 CMOS 或 CCD 硅半导体探测器,但 1550 纳米系统采用的铟镓砷 (InGaAs) 探测器仍然要贵的多。随着对这些更长波长探测器需求的增长,其价格预计会下降到可以商用的水平。
LiDAR 系统中所采用的架构和方法也有若干不同,从微型机械镜 (MEM) 到固态“闪光” LiDAR 等方面。但在大多数配置中,LiDAR 系统均使用飞行时间测距法来检测与截断照明光束的障碍之间的距离。飞行时间系统通过若干不同方法中的一种,测量出从发射脉冲光束至探测到反射返回光束所经过的时间,然后使用这个时间差值计算行进距离。
距离 = 速度 [c/na] × 飞行时间 [(tr-tl)/ 2]
c – 光速;na – 空气折射率;tr – 脉冲返回时刻;tl – 脉冲发射时刻
通过对周围环境持续不断的扫描,使用该飞行时间法的距离信息可以生成实时的三维点地图。此 LiDAR 制图解决方案的实现,意味着该地图不仅能显示出障碍物的存在,还能进行图像识别以确认物体及其在环境中的运动状态。举例来说,如果物体是另一辆车,则能确认这辆车是停止还是运动的,以及它的运动方向(是驶近还是驶离本车的行驶路径)。
请勿忘戴您的太阳镜
如果探测器是 LiDAR 系统的“眼睛”,那么光学滤波片就是“太阳镜”——减少眩光,让眼睛可以无背景干扰观察所寻求的目标。在实际使用中,这意味着光学滤波片在上述系统中的两种主要功能:a) 减少散射光、重影和背向反射;b) 提供波长的选择性,阻挡除发射的 LiDAR 光束以外的所有光线到达探测器,为探测器提供“背景干扰更少的更多信号”。
可以通过高效低损耗防反射 (AR) 镀膜来减少反射/散射影像。这些镀膜专为提供更低反射率 (< 0.5%) 而设计,适用于需要镀膜的光学器件(镜片、车窗、滤镜)正常运行所需的波长和角度。
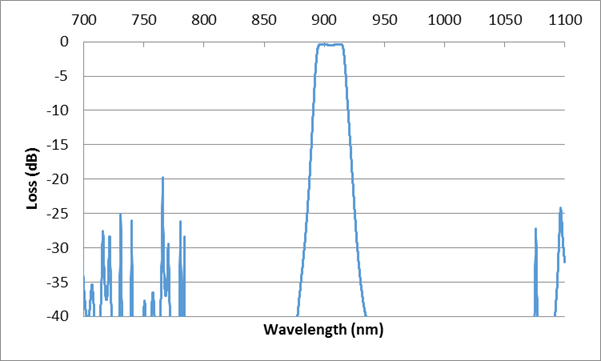
波长选择性需要一种更为复杂的光学滤波片,其高透射率波段(信号)要尽可能窄,而对其他外部光线(噪音干扰)有着波段宽泛的深度阻挡。在很多光学应用场景中,这种带通滤波功能很常见。如上文所述,车用 LiDAR 系统通常使用 905 纳米或 1550 纳米波长运行。而不论采用哪一种波长,所需的带通滤波片对“发射”的激光波段都会有很高 (> 90%) 的透射率。不同之处在于硅半导体探测器或铟镓砷探测器运行所需的波长范围(分别为 ~300 – 1100 纳米和 ~900 – 1700 纳米),因为这决定了背景“噪音”所需的深度(平均 < 0.01% 最佳(光密度为 4))阻挡范围。
要将 LiDAR 系统应用于汽车,系统中的几个方面为光学滤波片和镀膜的设计师和制造商带来了特殊的挑战。首先,挑战之一就是运行环境。这些滤波片可能会经历很宽泛的温度范围(零下 40℃ 到零上 80 ℃),特别是车窗所面临的环境,还可能暴露在雨水、冰层、道路除冰盐以及其他所有路上驾驶时所能遇到的元素环境中。这种不可控的环境因素推动了对热稳定滤波片的需求,同样还有对坚固可靠镀膜组合滤波片的需求。此外,在车辆使用寿命内,这些滤波片需要在没有维护和校准的情况下,在上述环境状况中正常运行。好消息是,在光通信滤波器领域已经有了类似的担忧(收录于 Telcordia 公司的可靠性标准中),因此这些问题已经非常清晰明了,且大部分已由滤波片制造商解决,尤其是采用高能溅射沉积技术的薄层镀膜滤波片。
光学摄像头可以提供场景的精确图像,但距离有限;不能提供距离和相对速度方面的信息,且只能在高可见度的良好光照条件下才能发挥作用。摄像头所提供的视野几乎就是人类驾驶员视野的重复,但我们想要且也需要比我们自己所见驾驶环境更佳的自动驾驶解决方案。
其次,很多 LiDAR 系统在探测器上采用了较宽的视场 (FOV),允许扫描更宽的场景,这就要求光学滤波片在一个更宽的角度范围中发挥功能,且不能有性能损失。多层干涉薄膜本质上会通过“蓝移”将波长缩短并增加光的入射角,引用一句“星际迷航”中斯科蒂的台词:“你们不能改变物理定律呀”。为解决这个波长变动问题,滤波片可以“过度设计”,使其拥有一个扩展到激光波长红色一侧的带通,用以使激光可在较宽的角度范围内保持透射。坏消息是,因为这会导致任一入射角都具有了更宽的带通,减弱了对背景干扰的阻挡。不过,对角度不敏感的新型材料组合已研发出现,这使得窄带通解决方案的设计比之前的应用前景更好。
通往未来之路
除上述提及的技术挑战外,当汽车 LiDAR 得以普遍应用之时,低成本且高产量的滤波片供应链将会产生巨大商业压力。找到技术解决方案还不够,必须要制定出可支持应对“便宜太阳镜”的快速增长需求的可行解决方案,那些自动驾驶的“司机们”很快即将开车上路了。
在街道上川流不息“5 级水平”自动驾驶汽车之前,我们还有很长的路要行走,但我们已经开车上路。自动驾驶光电传感器技术和光学滤波片让它们看得更清晰,而我们也已开始从中获益。